-

RV 소개

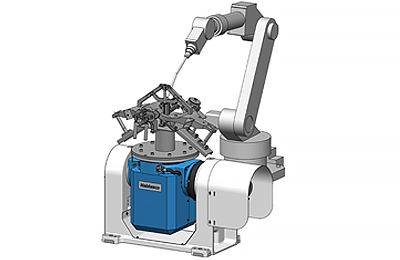
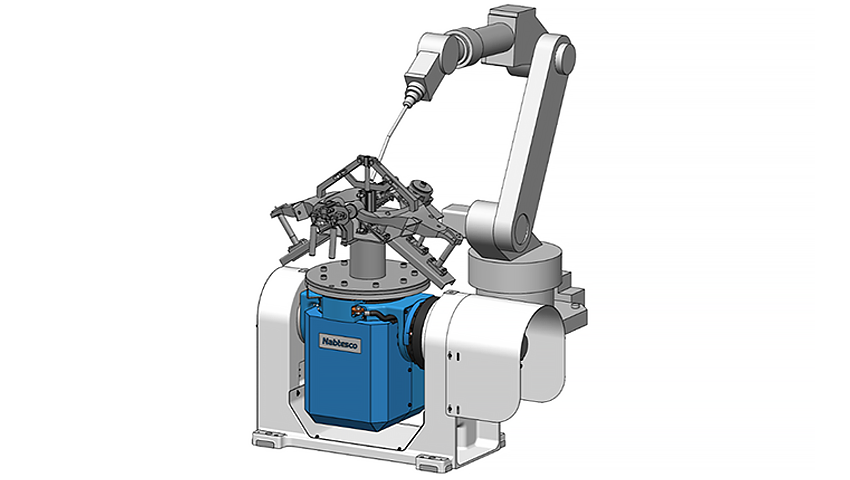
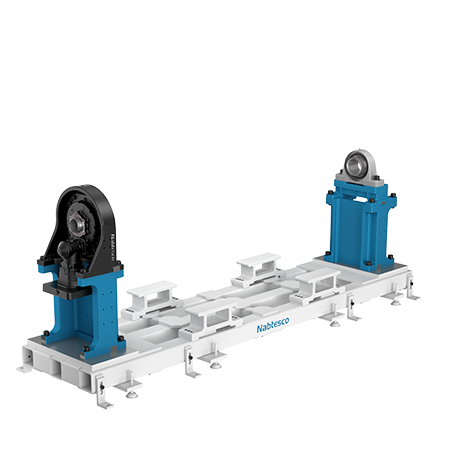
포지셔너 유니트RVP-A

2축 포지셔너 유니트
"각메이커의 서보 모터 장착 가능"을 통해 다양한 로봇과의 협동 작업에 대응."감속비를 선택 가능"에 의해 "택타임의 단축", "소형 모터 사용 가능"을 실현하였습니다.
사양
| 형식 |
|---|
| RVP-A05E |
|---|
| RVP-A05E |
| 식별1 | 시리즈명 | 기종 | 시리즈 기호 | 형식 | 모터 시리즈 | 정격출력 (w) |
정격출력 (kw) |
타입 | 모터 정격용량 (KW) |
모터 브레이크 정격 전압 (V) |
액추에이터 브레이크 정격전압 (V) |
감속비 | 실감속비 | 모터 장착구의 방향 | 정격토크 (N・m) |
최대 토크 (Nm) |
기동 정지 시 허용토크 (N・m) |
순간 최대 토크 (N・m) |
α 치수 (GH 샤프트) (mm) |
α 치수 (GH 샤프트) (mm) |
Din 치수 (mm) |
입력축 정격모멘트 (N・m) |
입력축 허용모멘트 (N・m) |
β 치수 (mm) |
정격회전수 (r.p.m.) |
정격수명 (hr) |
허용출력회전수 (r.p.m.) |
허용입력회전수 (r.p.m.) |
최고 출력회전수 (r.p.m.) |
백래쉬 (arc.min.) |
로스트모션 (arc.min.) |
비틀림 강성 (Nm/arc.min.) |
모멘트 강성 (Nm/arc.min.) |
기동효율 (%) |
관성모멘트 (kg・m^2) |
질량 (kg) |
허용모멘트① (N・m) |
허용트러스트① (N) |
허용모멘트② (N・m) |
허용트러스트② (N) |
출력회전속도① (min-1) |
출력토크① (N・m) |
출력회전속도② (min-1) |
출력토크② (N・m) |
브레이크 유지 토크 (N・m) |
허용부하관성모멘트 (kgm2) |
용량 | 품번 | 수량 | 출하시 포장 | 용량 | 품번 | 수량 | 출하시 포장 | 허용적재 중량 (참고) (kg) |
허용중심 높이 (mm) |
허용경사 각도 (deg) |
감속비(회전축) | 감속비(틸팅축) | 기동정지 허용토크(회전축) (Nm) |
기동정지 허용토크(틸팅축) (Nm) |
회전축 최고회전수(참고) (r.p.m.) |
틸팅축 최고회전수(참고) (r.p.m.) |
백래시, 로스트모션(회전축) (arc.min.) |
백래시, 로스트모션(틸팅축) (arc.min.) |
관성 모멘트I(I=GD2/4)입력축 환산치(회전축) (kg-m2) |
관성 모멘트I(I=GD2/4)입력축 환산치(틸팅축) (kg-m2) |
추천 모터용량(참고)※1 (w) |
휠 외경 (mm) |
최고속도 (m/min) |
허용 내하중/바퀴 (kgf) |
적재하중/4바퀴(참고)※1 (kgf) |
|---|
| 표준 | 6,000 | 232 | 500 | 300 | 135 | 150 | 156 | 2,450 | 4,000 | 20 (2.0sec/180deg) | 19 (1.0sec/90deg) | less than 1 | less than 1 | 8.45x10-4 | 1.23x10-4 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 고속 | 6,000 | 232 | 500 | 300 | 135 | 100.5 | 102.81 | 2,450 | 4,000 | 30 (1.33sec/180deg) | 29 (0.67sec/90deg) | less than 1 | less than 1 | 1.19x10-3 | 2.40x10-4 |
※1 사용환경・조건에 따라 변동합니다.
다운로드
RVP-A
시리즈

-
RV 소개