-

RV紹介

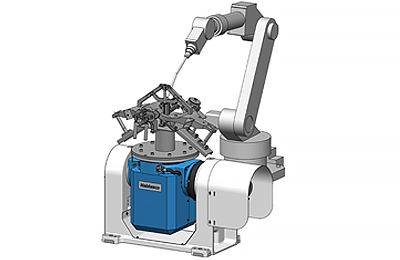
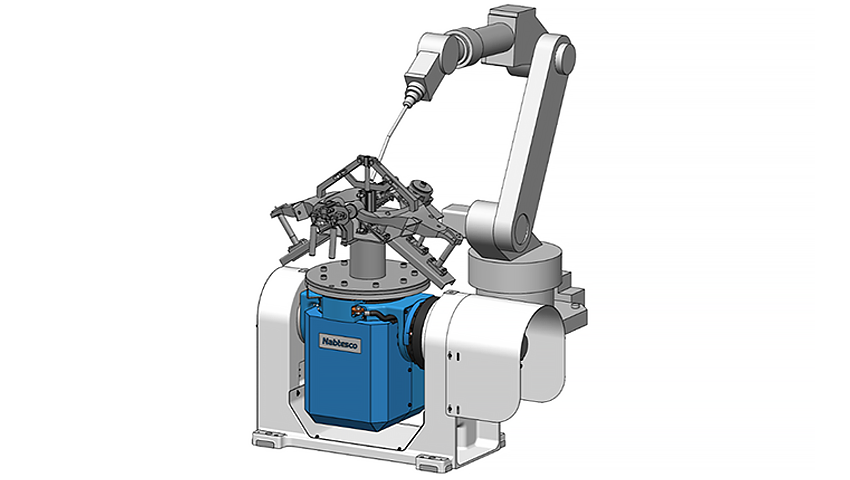
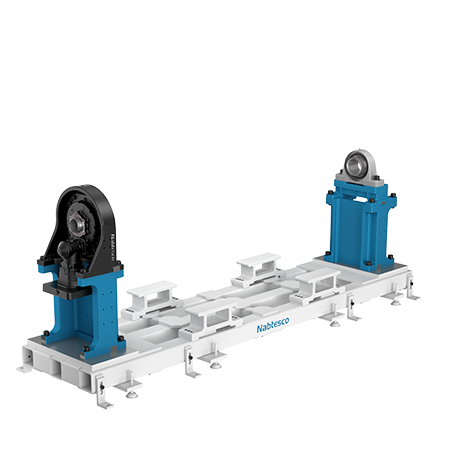
ポジショナーユニットRVP-A

2軸ポジショナーユニット
「各社サーボモータの取付可能」により様々なロボットとの協調作業に対応。「減速比を選択可能」により「タクトタイムの短縮」、「小型モータの使用可能」を実現しました。
仕様
| 型式 |
|---|
| RVP-A05E |
|---|
| RVP-A05E |
| 識別1 | シリーズ名 | 機種 | シリーズ記号 | 型式 | モーターシリーズ | 定格出力 (w) |
定格出力 (kw) |
タイプ | モータ定格容量 (KW) |
モータブレーキ定格電圧 (V) |
アクチュエータブレーキ定格電圧 (V) |
減速比 | 実減速比 | モータ取付口の向き | 定格トルク (N・m) |
最大トルク (Nm) |
起動停止時許容トルク (N・m) |
瞬時最大トルク (N・m) |
α寸法(GHシャフト) (mm) |
α寸法(GHシャフト) (mm) |
Din寸法 (mm) |
入力軸定格モーメント (N・m) |
入力軸許容モーメント (N・m) |
β寸法 (mm) |
定格回転数 (r.p.m.) |
定格寿命 (hr) |
許容出力回転数 (r.p.m.) |
許容入力回転数 (r.p.m.) |
最高出力回転数 (r.p.m.) |
バックラッシ (arc.min.) |
ロストモーション (arc.min.) |
ねじり剛性 (Nm/arc.min.) |
モーメント剛性 (Nm/arc.min.) |
起動効率 (%) |
慣性モーメント (kg・m^2) |
質量 (kg) |
許容モーメント① (N・m) |
許容スラスト① (N) |
許容モーメント② (N・m) |
許容スラスト② (N) |
出力回転速度① (min-1) |
出力トルク① (N・m) |
出力回転速度② (min-1) |
出力トルク② (N・m) |
ブレーキ保持トルク (N・m) |
許容負荷慣性モーメント (kgm2) |
容量 | 品番 | 数量 | 荷姿 | 容量 | 品番 | 数量 | 荷姿 | 許容積載 重量 (目安) (kg) |
許容重心高さ (mm) |
許容傾斜角度 (deg) |
減速比(旋回軸) | 減速比(傾倒軸) | 起動停止許容トルク(旋回軸) (Nm) |
起動停止許容トルク(傾倒軸) (Nm) |
旋回軸最高回転数(参考) (r.p.m.) |
傾倒軸最高回転数(参考) (r.p.m.) |
バックラッシュロストモーション(旋回軸) (arc.min.) |
バックラッシュロストモーション(傾倒軸) (arc.min.) |
慣性モーメントI(I=GD2/4)入力軸換算値(旋回軸) (kg-m2) |
慣性モーメントI(I=GD2/4)入力軸換算値(傾倒軸) (kg-m2) |
推奨モータ容量(目安)※1 (w) |
ホイール径 (mm) |
最高速度 ※1 (m/min) |
許容耐荷重/輪 (kgf) |
積載荷重/4輪(目安)※1 (kgf) |
|---|
| 標準 | 6,000 | 232 | 500 | 300 | 135 | 150 | 156 | 2,450 | 4,000 | 20 (2.0sec/180deg) | 19 (1.0sec/90deg) | less than 1 | less than 1 | 8.45x10-4 | 1.23x10-4 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 高速 | 6,000 | 232 | 500 | 300 | 135 | 100.5 | 102.81 | 2,450 | 4,000 | 30 (1.33sec/180deg) | 29 (0.67sec/90deg) | less than 1 | less than 1 | 1.19x10-3 | 2.40x10-4 |
※1 使用環境・条件により変動します
ダウンロード
RVP-A
シリーズ

-
RV紹介