-

Introduction

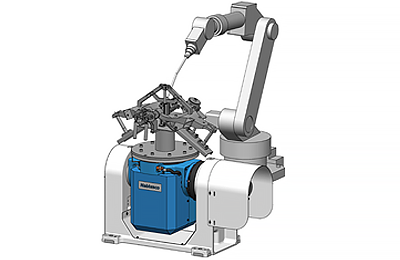
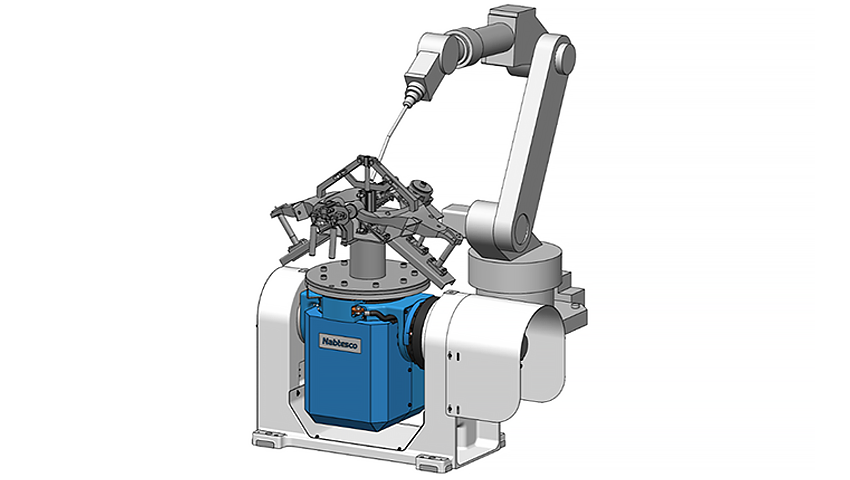
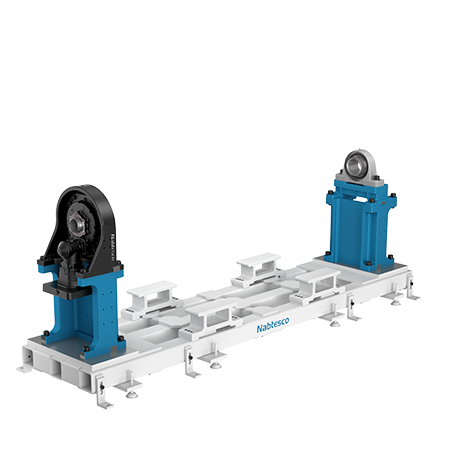
Positioner UnitsRVP-A

2-axis positioner unit
Able to install motors from all major servo motor manufacturers, making colloborative work with many different robots possible. Multiple reduction ratios mean the customer can choose the best possible combination for their application, reducing cycle times or allowing for use of small motors.
Product Features
- Able to choose from multiple reduction ratios
- Support for all major servo motor manufacturers
- Additional parts such as covers are available
- Completely sealed and filled with grease
- High-speed, high accuracy positioning
- Grounding unit for welding is available as an option
Spec Information
| Model |
|---|
| RVP-A05E |
|---|
| RVP-A05E |
| Discrimination1 | Series | Unit Type | Series Symbol | Model | Motor Series | w number (w) |
w number (kw) |
Type | Motor rated capacity (KW) |
Motor brake rated voltage (V) |
Actuator brake rated voltage (V) |
Ratio | Actual Ratio | motor mounting direction | Rated Torque (N・m) |
Maximum torque (Nm) |
Allowable Scceleration/Deceleration Torque (N・m) |
Momentary Maximum Allowable Torque (N・m) |
Dimension α1 (mm) |
Dimension α1 (mm) |
Dimension Din (mm) |
Input Shaft Rated Moment (N・m) |
Input Shaft Allowable Moment (N・m) |
Dimensionβ (mm) |
Rated Output Speed (r.p.m.) |
Rated life (hr) |
Allowable Output Speed (r.p.m.) |
Allowable Input Speed (r.p.m.) |
Maximum output speed (r.p.m.) |
Backlash (arc.min.) |
Lost Motion (arc.min.) |
Torsional Regidity (Nm/arc.min.) |
Moment Rejidity (Nm/arc.min.) |
Start-up Effciency (%) |
Moment of Inertia (kg・m^2) |
Mass (kg) |
Allowable Moment 1 (N・m) |
Allowance Thrust 1 (N) |
Allowable Moment 2 (N・m) |
Allowance Thrust 2 (N) |
Output Rotational Speed 1 (min-1) |
Output Torque 1 (N・m) |
Output Rotational Speed 2 (min-1) |
Output Torque 2 (N・m) |
Brake Holding Torque (N・m) |
Reduced Value Of The Inertia Moment For The Input Shaft (kgm2) |
Capacity | Part Number | Quantity | Packaging Type | Capacity | Part Number | Quantity | Packaging Type | Maximum allowable load (reference values) (kg) |
Maximum center of gravity height (mm) |
Maximum tilt angle (deg) |
Reduction ratio (Rotary axis) | Reduction ratio (Tilt axis) | Allowable startup/stop torque (Rotary axis) (Nm) |
Allowable startup/stop torque (Tilt axis) (Nm) |
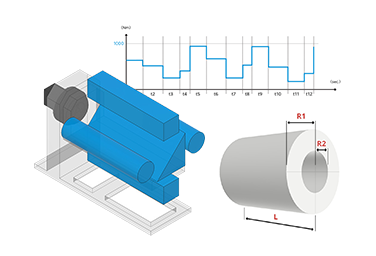
Rotary axis allowable output speed (Operation Example) (r.p.m.) |
Tilt axis allowable output speed (Operation Example) (r.p.m.) |
Backlash・Lost motion (Rotary axis) (arc.min.) |
Backlash・Lost motion (Tilt axis) (arc.min.) |
Moment of inertia I (I=GD2/4) motor input conversion (Rotary axis) (kg-m2) |
Moment of inertia I (I=GD2/4) motor input conversion (Tilt axis) (kg-m2) |
Motor capacity (reference values) ※1 (w) |
Wheel diameter (mm) |
Maximum speed ※1 (m/min) |
Loading capacity/wheel (kgf) |
Loading load/4 wheels AGV (reference values) ※1 (kgf) |
|---|
| Normal | 6,000 | 232 | 500 | 300 | 135 | 150 | 156 | 2,450 | 4,000 | 20 (2.0sec/180deg) | 19 (1.0sec/90deg) | less than 1 | less than 1 | 8.45x10-4 | 1.23x10-4 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| hi-speed | 6,000 | 232 | 500 | 300 | 135 | 100.5 | 102.81 | 2,450 | 4,000 | 30 (1.33sec/180deg) | 29 (0.67sec/90deg) | less than 1 | less than 1 | 1.19x10-3 | 2.40x10-4 |
Download
RVP-A
Series
Product Catalog
Positioner Units
Positioners units that use the Precision Reduction Gear RV. Support for all major servo motors. Drastically reduces the time and effort required for design, manufacturing and assembly.

-
Introduction
- TOP
- Product Lineup
- Positioner Units RVP-A